Proyecto independiente — Chile — 2026
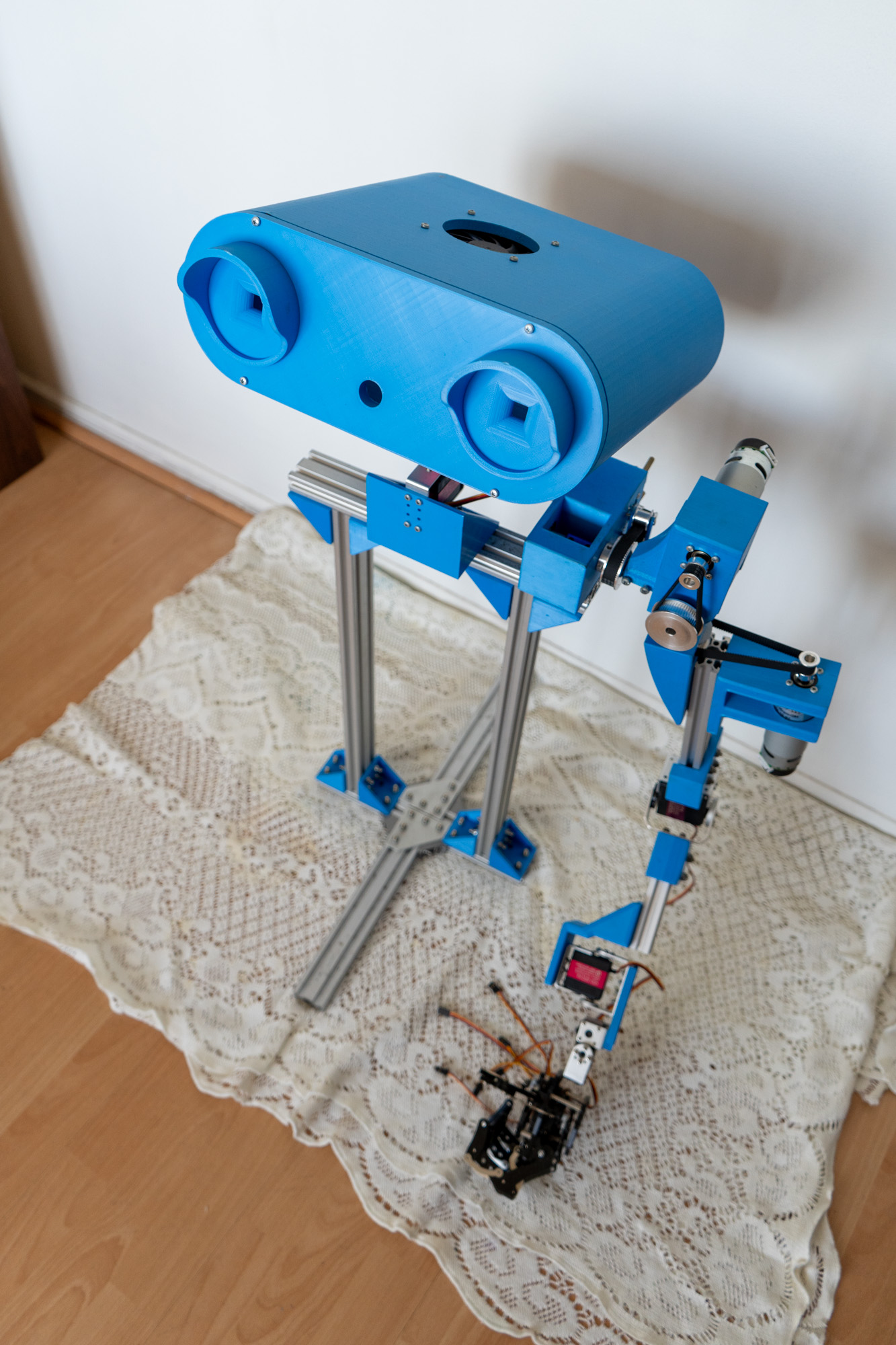
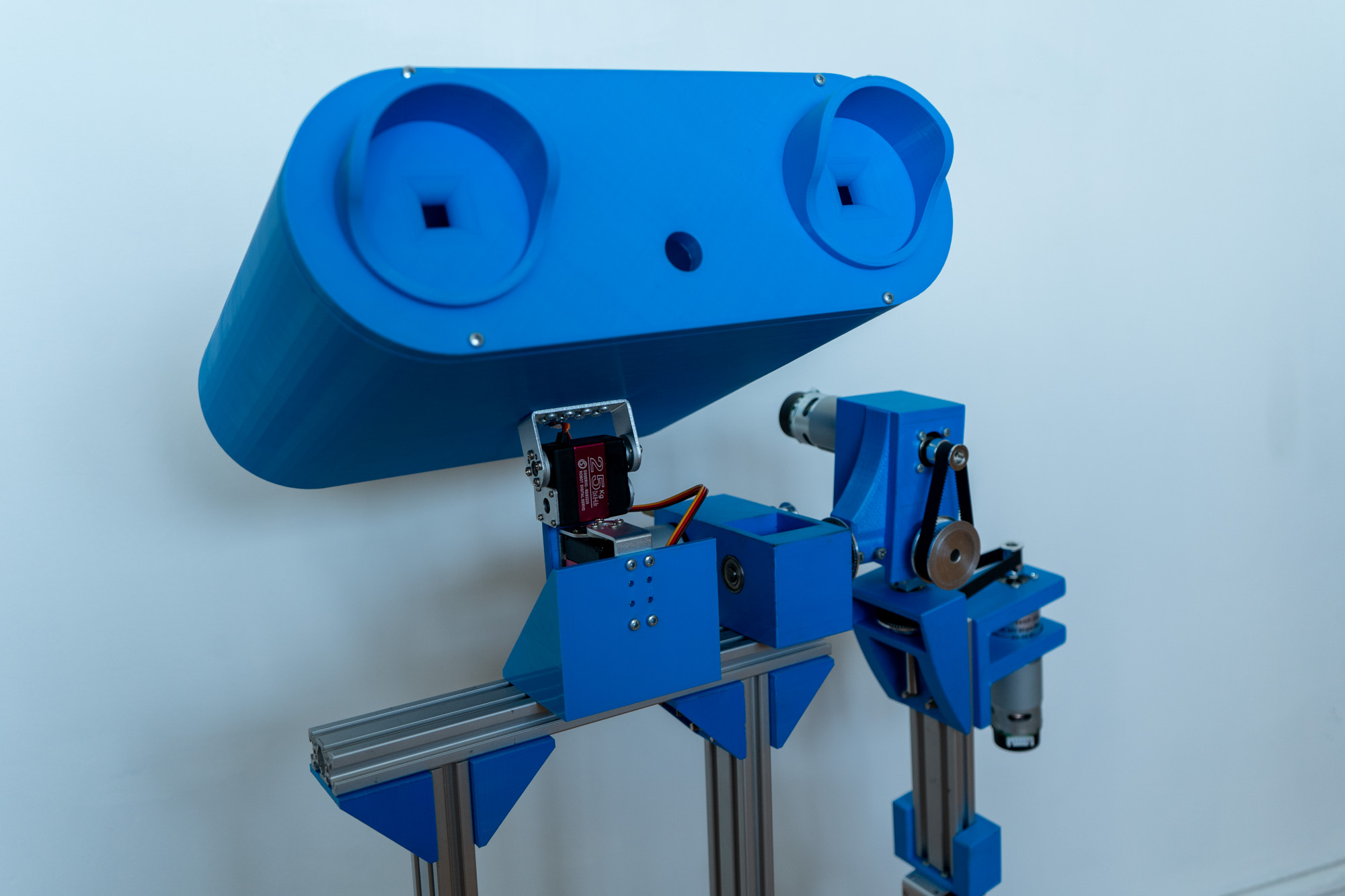
CORAMO
Robot humanoide de doble brazo controlado por voz con IA completamente local. Sin internet. Sin nube. Sin terceros.
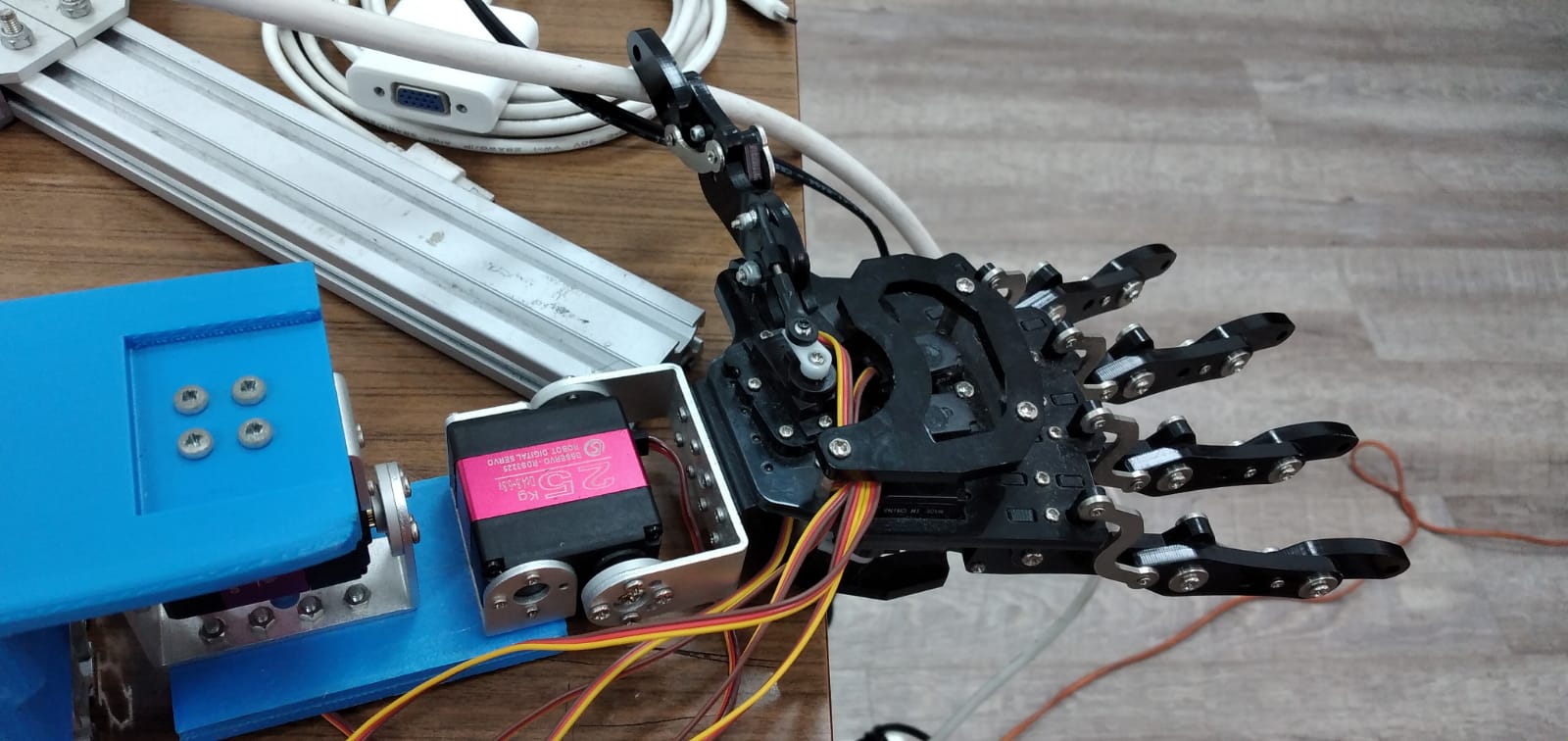
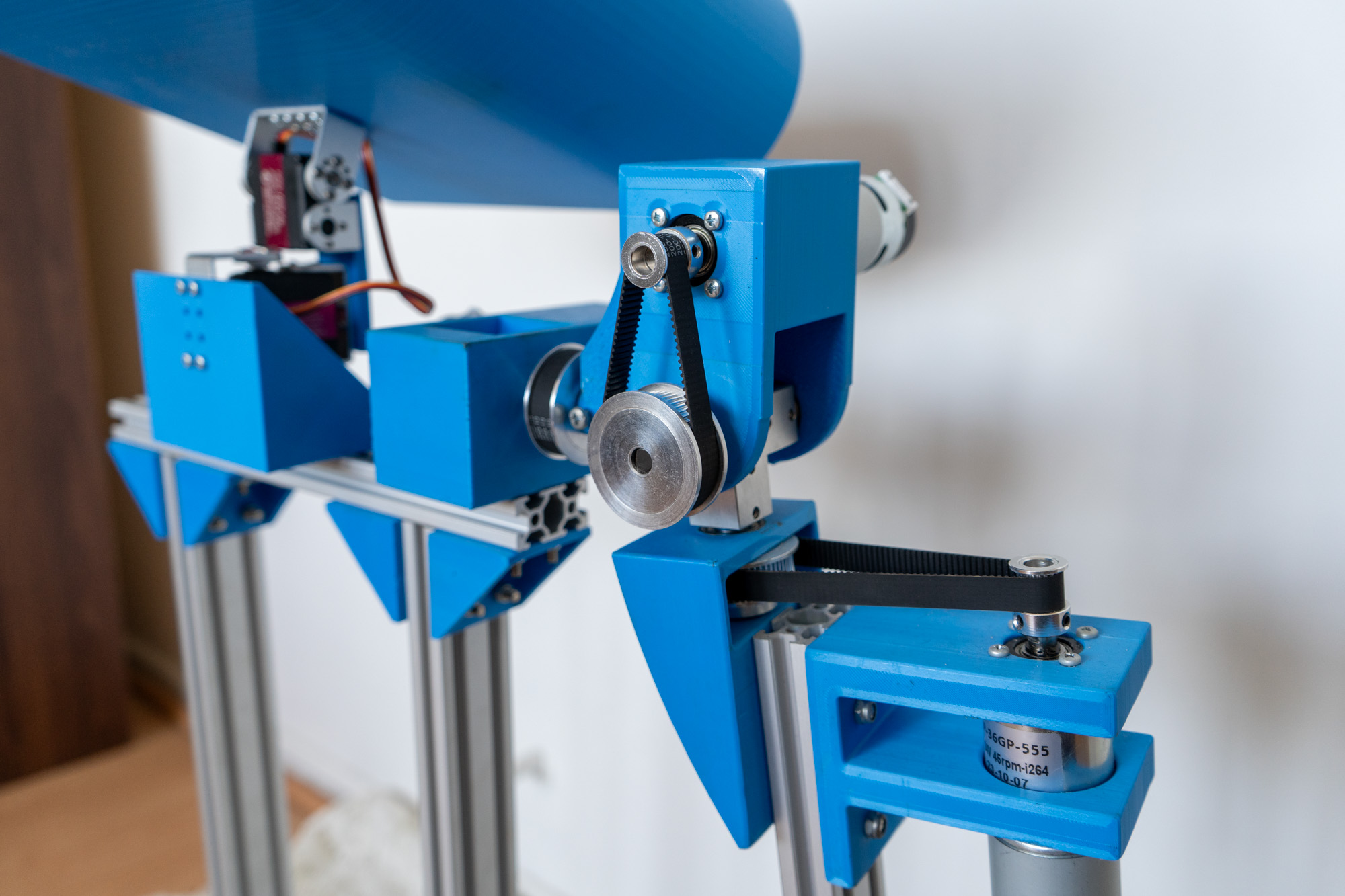
24
Actuadores
32GB
RAM DDR3
16GB
VRAM
~6s
Latencia actual
0
Dependencias cloud